



| 型号名称 | 产品描述 | 下载 | 购买 | |||||||||||||||||||||||||||||||||||||||||||||||||||
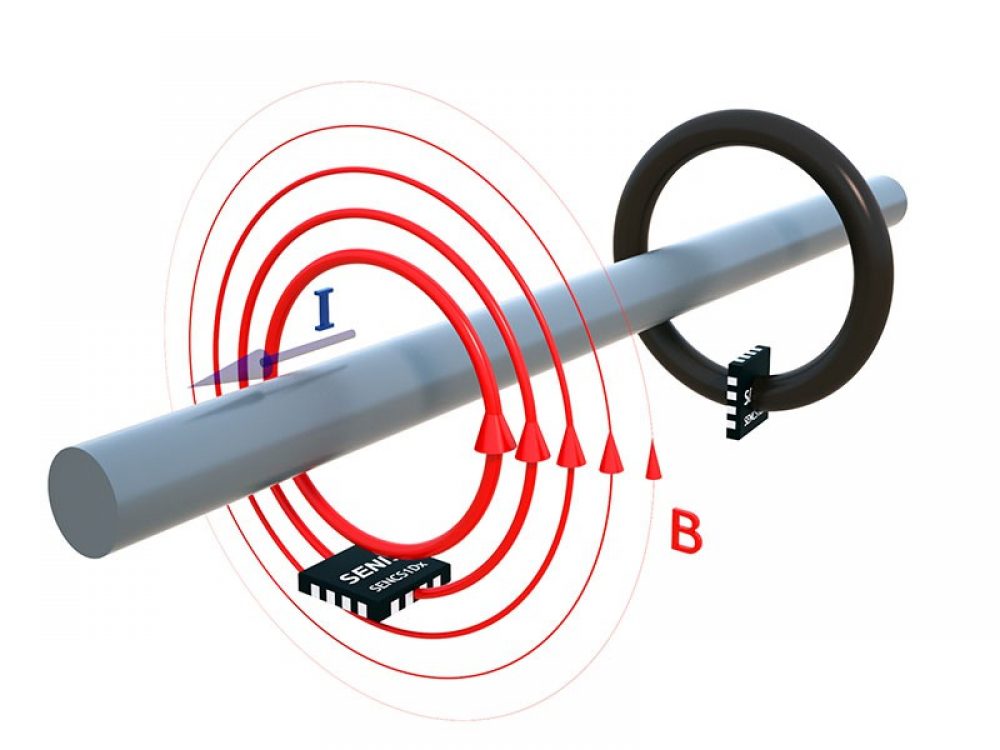 |
概述:SENIS® SENCS1Dx 是一款可编程电流传感器,它采用线性霍尔传感器和线圈相结合的方式,以拓宽测量带宽并提高信噪比,也就是说,提升分辨率。这种组合使该传感器具备了市场上同类传感器中最高的频率带宽。该传感器可提供与所施加的磁场密度成比例的模拟输出电压。该传感器的传输特性在出厂时已针对温度进行了校准微调,并且在客户进行生产线末端校准(超出默认的出厂校准微调范围)时,其可编程参数包括偏移量、灵敏度、滤波等。在典型的电流传感应用中,该传感器需与一个环形软磁芯配合使用。对于高带宽应用场景,建议采用铁氧体或叠片式软磁芯。 应用:电机驱动、电池充电、电力电子、短路保护、电力传输。 初步规格: 灵敏度平行或垂直于芯片表面; 超快响应时间 <0.5us; 32 个可选输出范围,从 5mT 到 1T; 磁场分辨率:0.5uT; 大 f 带宽:DC 至 1MHz; 静态参考输出,可在 0-5V 范围内进行调整; 模拟输出(比例和非比例); 工作温度:-40 / +150C; 电源:3.3V-5.5V;欠压/过压检测; 销售电话:15601837360
静电放电:4kV |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
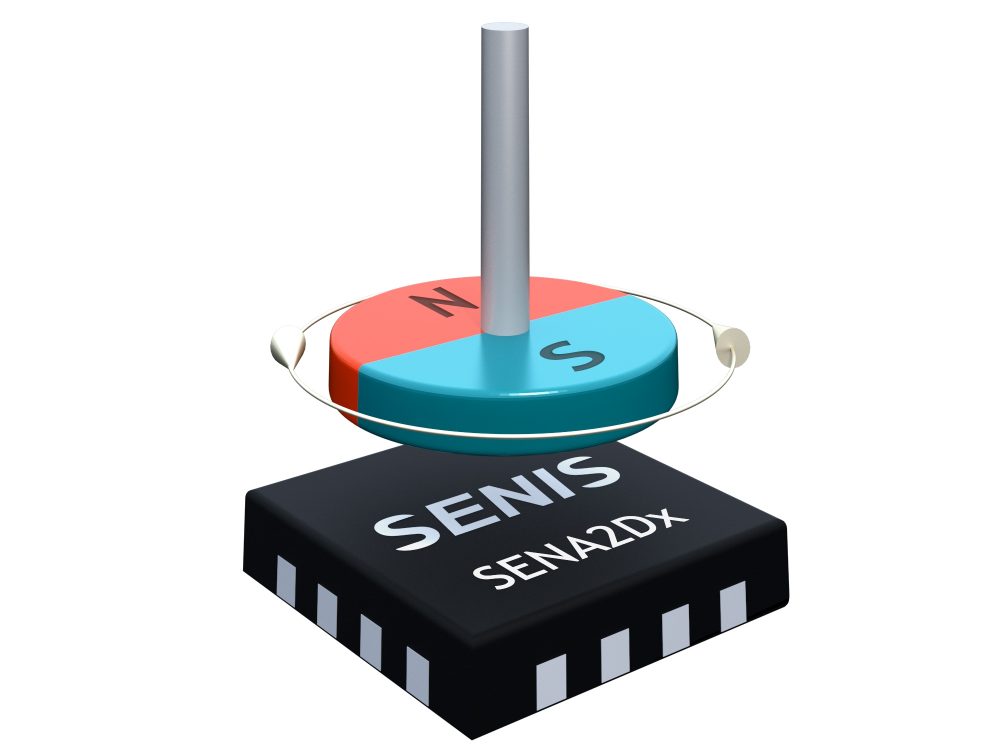 |
概述:SENIS 快速磁角传感器(FAMAS)SENA2Dx 是一款集成式磁场传感器,它能够测量磁场平面内分量的旋转角度,例如安装在旋转轴轴线上的永磁体所产生磁场的旋转角度。协同集成的信号处理电路构成一个伺服回路,用于跟踪外部磁场,该回路可将磁场的角位置直接转换为数字信息。因此,在不到 1 微秒的延迟时间后,即可获取磁场的角位置、旋转方向和角速度信息。该传感器有三种工作模式可供选择,分别是快速模式、平衡模式和高分辨率模式,以便为特定应用提供最佳性能。 特性: 非接触式角度传感器,测量范围为 0 至 360°;
基于霍尔原理,采用专利的直接角度到数字转换技术(无需角度计算); 三种可选磁场强度:低(20 毫特斯拉)、中(100 毫特斯拉)和高(400 毫特斯拉); 超过 500 毫特斯拉的强磁场也不会对传感器造成损坏; 小角度感应体积为 100×100×10 立方微米; 角度值采用 12 位表示,即分辨率为 0.088°; 响应速度快,信号传播延迟小于 1 微秒; 可测量磁场的方向、角度和转速,范围从直流到每分钟 40 万转; 片上偏移、灵敏度和角度误差校正功能; 片上对偏移和灵敏度进行温度补偿; 非易失性存储器,用于永久配置和校正编程; 接口:四线 SPI(5 伏)、带索引的正交接口(ABZ)、换向信号(UVW); 客户编程功能(SPI): 设置零旋转位置; 数字输出格式选择:ABZ 或 UVW; 可选分辨率为 8 至 12 位; 角度误差校正; UVW 可配置用于 2 极、4 极、6 极和 8 极磁体; 低磁场阈值检测功能。 应用: 绝对旋转位置传感器 电机控制方面的应用: - 机器人系统 - 直流无刷电机 - 电机反馈/运动控制 - 转速控制 可替代光学编码器 可替代电位器 高速加工工具 销售电话:15601837360
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
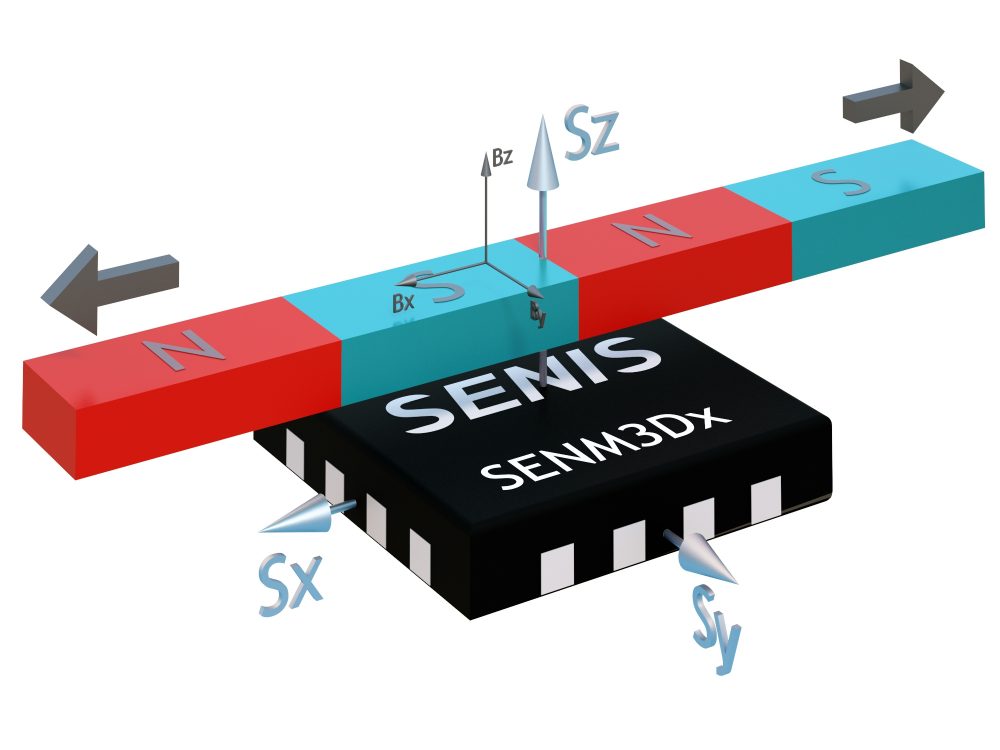 |
概述:SENM3Dx是一款CMOS磁场传感器,它能够在同一时间、同一位置采集所有三个磁场分量(Bx、By 和 Bz)。该传感器集成了三组相互正交的霍尔效应元件(一组水平元件和两组垂直元件),并且为每组元件都配备了偏置电路和放大器。集成的霍尔元件结构非常紧凑,仅占据约 100×100㎛ ²的小面积。这使得该传感器具有极高的空间分辨率。所采用的 CMOS 技术能够在制造垂直和水平霍尔元件时实现高精度,从而使得三个测量 / 灵敏度轴 Bx、By 和 Bz 具有较高的角度精度(正交性)。在霍尔元件的偏置中应用旋转电流技术可显著抑制失调、低频噪声以及平面霍尔效应。该传感器提供从直流到 220 khz的高模拟带宽。内置的温度传感器能够测量磁场敏感区域内的当前芯片温度。 特点: 具备真正的三维磁场测量功能,且能够选择激活的灵敏度轴;可同时选择任意一个、两个或全部三个轴进行测量; 拥有模拟、脉宽调制(PWM)以及串行外设接口(SPI 5V))数字接口; 磁场分辨率高,可达 1 µT; 磁场敏感体积为 100×100×10 µm3; 测量范围可选择,范围从 20 mT到 4 T; 模拟频率带宽高,从直流到 220 kHz; 内置温度传感器; 可在芯片上对灵敏度、失调、噪声和温度漂移进行校正,且可在电可擦可编程只读存储器(EEPROM)中设置相关参数; 能够分别针对每个霍尔传感器(Bx、By 和 Bz)进行可调节的信号调理; 每个通道都配备可编程阈值比较器,从而实现信号电平检测功能。 典型应用:三维定位传感器,用于操纵杆的线性和角度测量,也可作为角度传感器;一维、二维、三维接近传感器;可选择任意轴且测量范围可选的电流传感器;磁力计、多探头测量装置,例如传感器阵列。 销售电话:15601837360
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
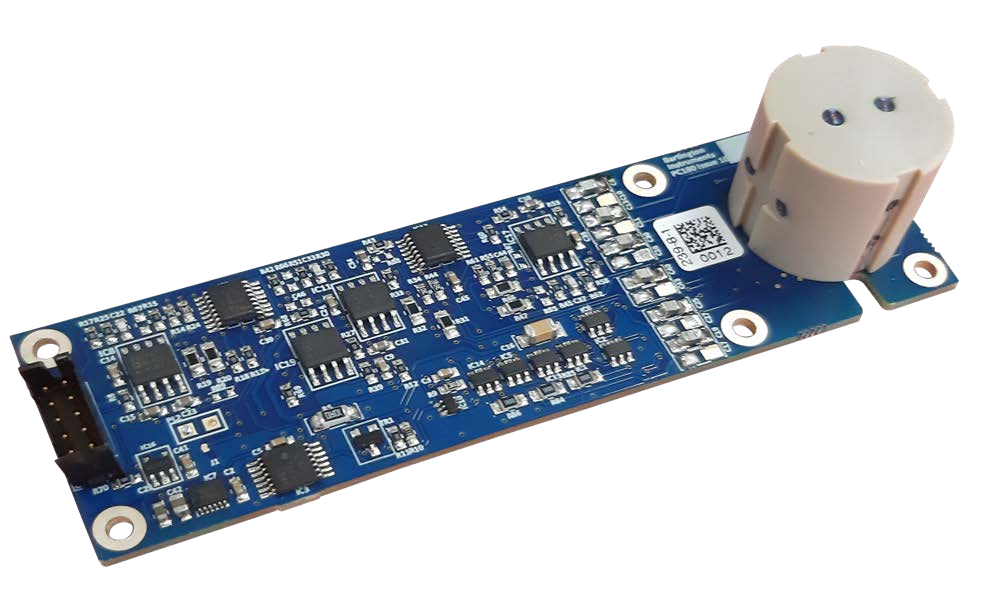 |
概述:Mag900低功耗未封装的三维磁通门传感器在窄噪声带内提供高灵敏度的磁场测量。其极低的功耗使其成为监视和周边安全应用的理想选择。 技术参数:
销售电话:15601837360
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
概述:一种IMU数字罗盘,可提供高测量分辨率,在俯倾角(倾角)限制其他罗盘实用性的高纬度地区至关重要。低延迟且无过冲,可实现快速目标采集。不含ITAR,包括 PNI 的磁传感器、最先进的低 SWaP 陀螺仪、加速度计和PNI的 15 态卡尔曼滤波器传感器融合算法,可根据您的用例进行定制。多种校准方法,在各种应用中易于使用且准确,非常适合远目标定位仪、激光测距仪和PNT定向。 技术规格:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
概述:SeaTRAX-85º 是第一款拖曳阵列航向传感器,旨在在恶劣、极端的纬度地区提供最准确的航向数据。其高灵敏度磁力计读数通过最先进的算法进行改进,这些算法可校准磁失真并补偿所有倾斜角度。它提供精确、可靠的航向、俯仰、滚动、磁传感器和加速度计读数的串行数字输出。尺寸不到其他航向传感器的一半,几乎可以安装在任何地方。由于它仅消耗十分之一的功率,因此非常适合在长时间任务和恶劣环境中使用。与许多拖曳阵列中使用的标准传感器不同,SeaTRAX-85º 在北极圈内可提供0.25º的航向精度——这在微型数字磁罗盘模块中是闻所未闻的。即使在85°纬度,它也提供优于1.5°的航向精度。它在低纬度地区也能很好地工作。 应用:SeaTRAX-85º非常适合包括拖曳阵列、反潜战、地震拖缆以及北极和南极地区的军事勘探和行动在内的应用。 技术规格:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
概述:TRAX2将PNI的高灵敏度磁传感器与高稳定性IMU相结合,可在各种条件下实现精确的航向、俯仰和滚动。在低功耗预算下提供卓越的性能,从而延长任务持续时间;不含ITAR,美国制造;不同的用例需要不同的传感器融合算法;PNI的15态Kalamn滤波器带有用户可调旋钮,可在现场快速更改算法;多种校准方法可确保各种工业、科学、海洋和军事应用的准确性。 技术规格:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
概述:一种新的Low-SWaP-C 瞄准罗盘,提供准确的航向,可最大限度地减少现场校准的需要。凭借0.25º的寻北精度,它是远目标定位和激光测距应用的理想指南针。TargetPoint3是独立的、防震的,并且具有所有指南针中最低的功率需求;非常适合武器和手持应用。与通常需要复杂重新校准程序的传统数字磁罗盘不同,TargetPoint3按度数提醒用户其航向精度,确保无需重新校准即可获得更多实用性。 技术规格:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
 |
概述:全新 Low SWaP-C Prime Pro的尺寸不到其他数字罗盘的一半,更坚固,功耗更低,并且随着时间的推移保持精确定位。Prime Pro 嵌入了久经考验的算法,可提供 1º 的现场航向和 0.5° 的倾斜精度。非常适合激光测距仪、ADCP、浮标、钻井或海洋学系统。功耗极低,易于集成且极具成本效益。 技术规格:
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
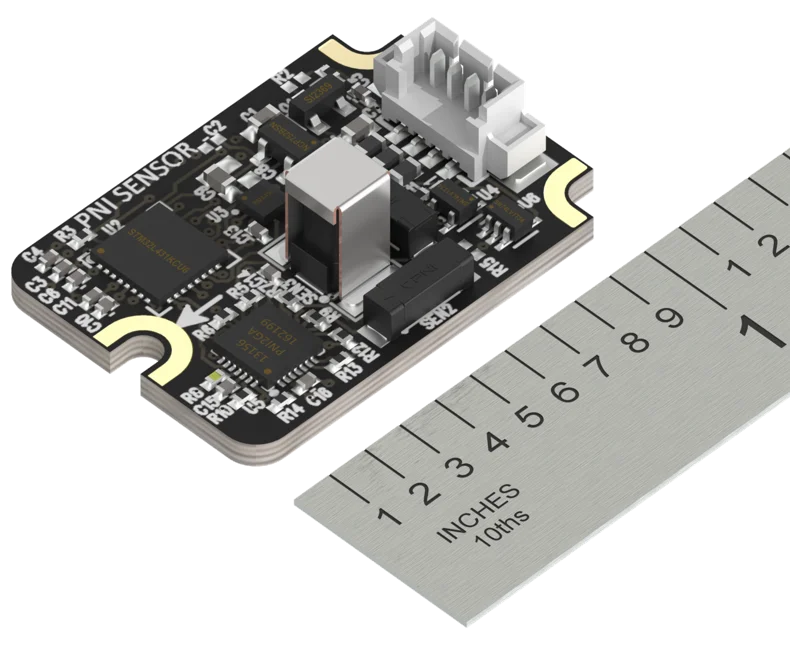 |
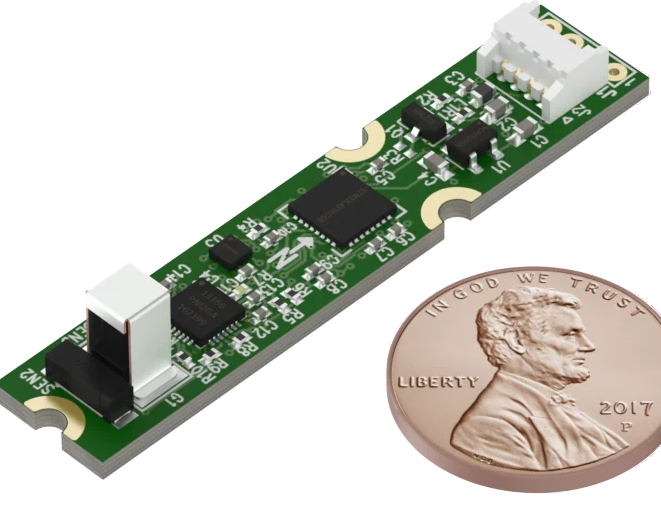
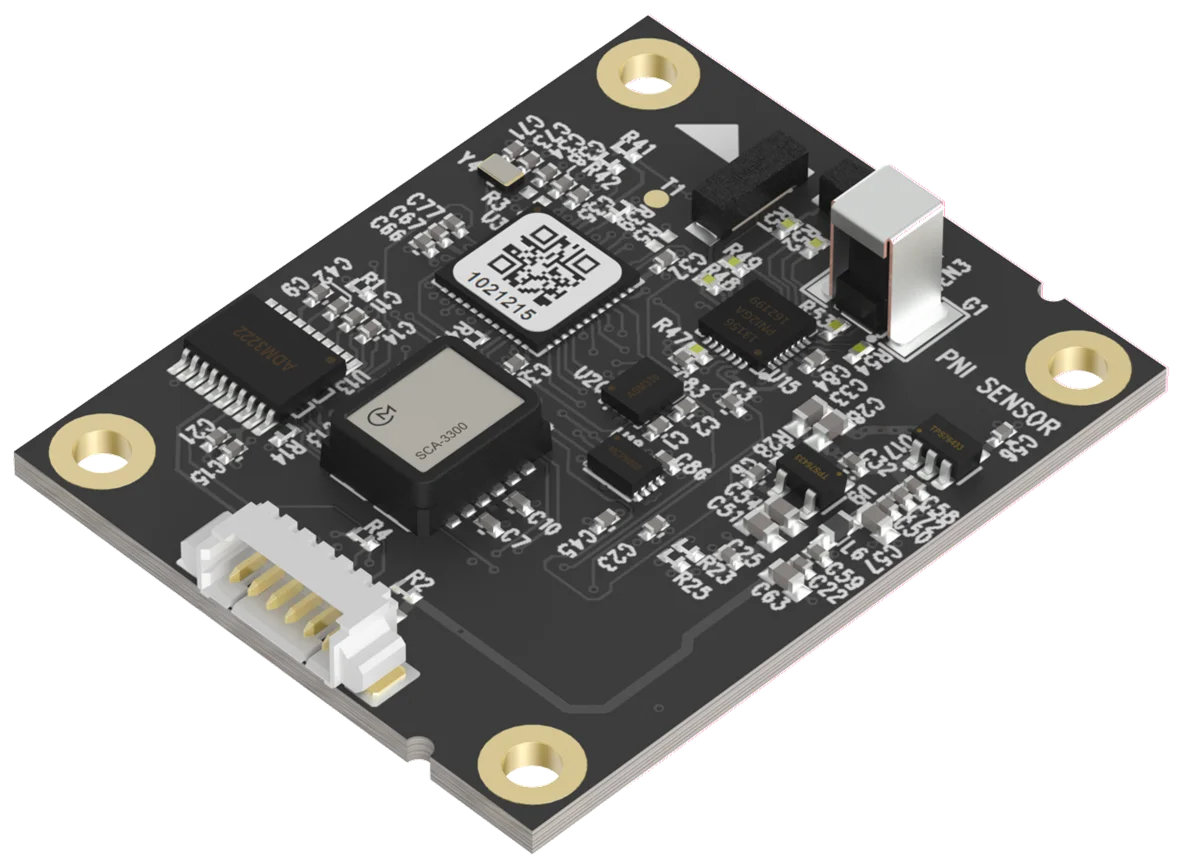
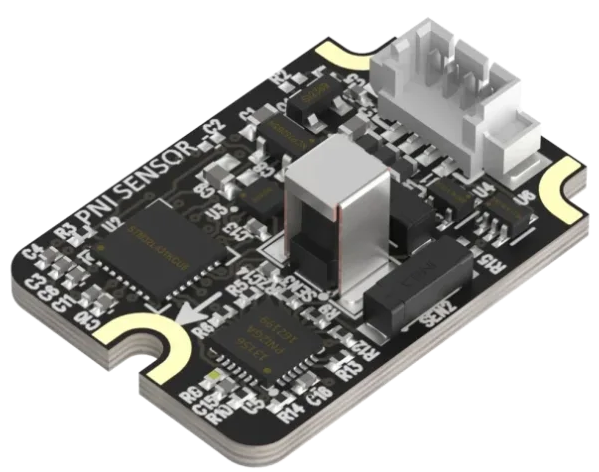
概述:新型 NaviGuider 简单易集成,是一个完整的基于传感器的 IMU 引导模块。NaviGuider 模块包含一个 RM3100 磁传感器、一个加速度计和一个陀螺仪,所有这些都紧密融合在一个超低功耗的 Edge-AI 传感器协处理器上,让您的主机处理器腾出时间进行其他工作。它配备了最新的军用级算法,包括连续硬铁和软铁磁性自动校准、重要的磁异常补偿以及业界领先且经过实际验证的传感器融合算法,所有这些都采用微小的低 SWaP 形式。NaviGuider 的15态卡尔曼滤波器使用来自传感器的数据来提供可靠的运动跟踪和准确的罗盘航向,同时功耗不到30 mW。它减轻了主机处理器的大量计算工作负载,以实现更长的系统部署。易于安装:NaviGuider 有一个面板安装式印刷电路组件,带有一个用于电缆接口的连接器。其小尺寸、UART接口和ASCII协议使系统集成变得简单明了。对于嵌入式设计人员,NaviGuider-I²C 可在表面贴装 PCBA 上提供 I²C 接口。
技术规格
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
| [共11页] [第5页] [10条/页] [共105条] [首页][上一页] [下一页][末页] | ||||||||||||||||||||||||||||||||||||||||||||||||||||||




